

schafbo
-
Posts
13 -
Joined
-
Last visited




schafbo's Achievements
Member (2/4)
0
Reputation
-
Dear Schafbo,
I am new on Unitronics and need to make a canbus 2.0b structure. Could you please share your can2.0 example with me.
Thanks and best regards.
-

Hi,
Please send your request to email support@unitronics.com
-
-
Making sure MI 30 wasn't being written by anything was one of the first thing I checked. I changed it to a different integer value and still had the same issue. I put a 20ms delay on the scan function and it looks like this fixed it. Maybe I am not understanding how the buffer works? Any way, I will be sure to put a small delay on any CAN Send/Scan functions from now on.
-
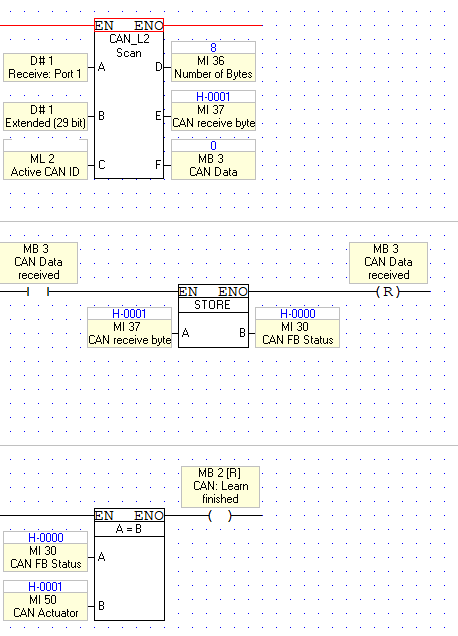
I forgot to mention that the Send function is on a 20 ms timer. The program is small, but I checked to make sure MI 30 isn't being written anywhere else and it is not. I tried replacing the CAN data received (MB 3) condition with a system timer and works correctly so it seems the CAN Data Arrived bit is never HIGH, but it still populates the MI 37 vector. I've also tried stepping through the program and it does indicate that MB 3 is high, though MI 37 is never stored in MI 30. I would like to use MB 3 as the condition to store the CAN data though, I'm not sure why it isn't working?


-
I'm having trouble getting the scan function to work for CANbus Layer 2 functions with a V130. I have gotten the Send function to work (device functions), so I think my configuration is fine. When I run the scan function, the received data appears at the location vector (MI 37) but the data is never stored at MI 30. This is likely because MB 3 is never ON. When I run Online Test it shows MB 3 temporarily ON (as it should) but I'm skeptical if this is truly working. The CAN ID is correct. Am using the scan function correctly? Are there any examples of how to use the CANbus Layer 2 functions on the V130? Could there be any hardware problems? I have 120 ohm resistors at each end of the bus.
-
PID Motion control
schafbo replied to schafbo's topic in Vision & Samba PLC + HMI Controllers & VisiLogic Software
Larger pneumatic actuators are generally slower, but this particular actuator has a small cylinder using 3 to 9 bar of pressure. I have used these actuators with data acquisition devices that are capable of sampling at 2 ms and achieved a much better response time and PID loop performance, however these devices are impractical for controller applications. I was really looking for a PLC solution, but if it is true that PLCs are generally limited at 10 ms I will have to look at something else. -
PID Motion control
schafbo replied to schafbo's topic in Vision & Samba PLC + HMI Controllers & VisiLogic Software
What alternatives are there to PLC? I am using analog input and analog output. Analog input is connected to a voltage position sensor on the actuator. Analog output is connected to an electronic regulator that supplies the pneumatic actuator. I did not consider the conversion time for analog input, according to the spec it is 30 ms. Does this mean my PID actually runs with 30 ms sample time? -
I am looking for a PLC to control an electro-pneumatic regulator in a motion control application. I regularly use the V130 PLCs, but for this application 10 ms of sample time seems to be too slow. I was wondering if there were any Unitronics PLCs that had a faster PID sample time capability? I am looking for 2 ms (or ideally 1 ms) sample time.
-
Do HSO need to be powered?
schafbo replied to schafbo's topic in Vision & Samba PLC + HMI Controllers & VisiLogic Software
I forgot to mention that the motor driver has 3 inputs: +12 Vdc, PWM, and ground. Based on your description I should be connecting the PLC like this?
-
Hello, I am using the high speed output of the V130 TR34 to generate a PWM signal for a motor driver. From the installation guide it is not clear whether a power supply and pull up resistor are needed or if the HSO is already a powered input. Without connecting a supply, I'm noticing that the V130 gives a 10V peak to peak PWM signal. This is enough signal to power my application, but I'm wonder if this is the intended wiring, as I want to connect multiple drivers to my high speed output later on.
-
What does a status message of 1000 mean in the PTO Configuration block? In the help file it only lists messages as having numbers 0-8. I am using a V130-J-TRA22.
-
Great! Thanks
-
I sure hope not. I was setting up the High Speed Output example with a V130-TRA33 and accidently set SB 300 (Reset PLC) to a coil that is always ON. I uploaded to the PLC and when running the programming it continuously resets itself. I've tried to upload new programs and stop/reset the PLC in the Communications tab, but it keeps giving me the "Connections could not be established due to..." error like the PLC isn't plugged in. My port/baud settings are correct, I have another V130 that I use and can upload to. Has anyone encountered this?
-
The driver is a Lin Engineering R1025 with just step and direction inputs, there's no serial or other communication interface.
-
Hello, I have a V130 (RA-22) PLC and recently obtained a stepper motor and driver board that I was hoping to use. The RA-22 model of the V130 doesn't have high speed outputs, are the regular outputs (it has relay and analog outputs) fast enough send pulses to the stepper motor driver? Or do I need to purchase a high speed output module to use the motor?



