ylle
-
Posts
5 -
Joined
-
Last visited
ylle's Achievements
Newbie (1/4)
0
Reputation
-
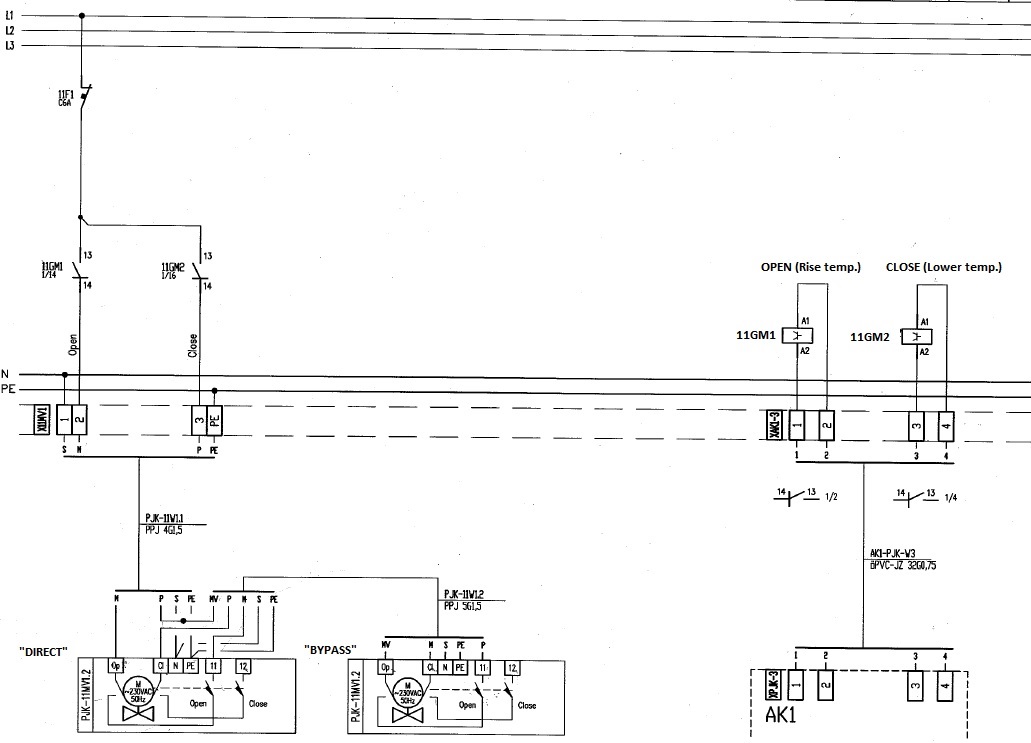
Hi, This motorized valves are in district heating boilerhouse. Im using Belimo actuators DGR230A-7, with no feedback potensiometer, but with auxiliary switches for series- connection (as it is seen in File 2). Im using Unitronics V1040 and I want to use one PID to control outgoing temperature. 1. Is this a closed loop hydronic heating system in which the temperature and pressure changes of the returning water are slower but heat load can be radically different? - Yes, this is a closed loop heating system, there is a pump which keeps pressure difference between IN&OUT (e.g OUT 3,5 bar, IN 2,5 bar). Returning water to a boilerhouse is always cooler that outgoing water (e.g returning water is IN=40C, water from boiler 70C, water after mixing OUT=60C). 4. Are the valves you have power to open and power to close without any kind of spring return? - No feedback. 5. Are the valves gate, ball, butterfly, or globe type? (very different flow curves at the same percentage open positions) - Valves are butterfly type. 6. When you say the valves will be in series are you saying that you want to have a digital open and close contact where the open power feeds open on the main valve and close on the bypass valve and the close signal powers close on the main valve and open on the bypass valve? - Yes, as it is seen in File 2. *Actually, all this electrical drawnings and algorithm, these are not final solution, sure ise only that there is no feedback and both valves are having auxiliary switches, actuators are leading butterfly valves, valve positions are manipulated by motor power. So, you think I have to use 4 ouputs- 2 for bypass valve and 2 for direct valve (not 2 outputs for both valves)? When valves are having both their own outputs, then I can calculate their virtual positions. If i want raise temperature, I just close little bit bypass and open little bit direct valve. If I want lower temperature, I just open little bit bypass and open little bit direct valve. Ok, if im going to make control of valves to analog which is possible ( relays with 0-10Vdc input), would be there 2 analog outputs, one for bypass valve, one for direct valve? How the logic would be build up? Which analog value would be condition fo close/open relay? Greetings, Ylle
-
Hi, I have to make logic were one PID loop controls two series-connected valves (look File 2). In logic, PID SP is temperature what comes from dynamical graph (depend on the external air temp), PV is outgoing temperature (after valves), PID CV is used to activate PLC relay outputs- OPEN, CLOSE (look File 1) There is no feedback from valves, from technical data is known that OPEN position to CLOSE position takes 150 sec (both valves are same type). Actions: 1. If its needed to raise water temperature, then its activated OPEN output, which is linked to valve "Direct" (look File 2, 11GM1). When valve "Direct" is full-open, but temp. isnt still high then end- switch Open will be electrically close valve "Bypass". 2. If its needed to lower water temperature, then its activated CLOSE output, which is linked to valve "Bypass" (look File 2, 11GM2). When valve "Bypass" is full-open, but temp. isnt still low then end- switch Open will be electrically close valve "Direct". First positions (physically) are , before PID Auto -tuning 40/60: "Direct" valve start position is 60% opened and "Bypass" valve start position is 40% opened (maybe 50/50 would be better?). I have looked U90 Ladder example "PID with motorized valve". It seemed very helpful, in example primary loop PID is looking SP-PV error and secondary loop compares PID CV and Virtual Valve Position. In example there is only one valve, how to do it with two valves what are series-connected? OK, in logic OPEN output is increasing "Direct" valve position and CLOSE output is increasing "Bypass" valve position, but what to do in logic when movement physically goes over to series-connected valve (look algorithm and File 2)? Ylle


-
Hi. My V350 is communicating with Modbus device. It`s quite simple becose almost all Modbus device registers are 16-bits, I have to worry about were to but comma in MI-s. But im confiused about two register. In Modbus device manual there are notes about those register and i dont know do I have to swap or just directy store those 16-bits registers into DW or ML; or make same mathematical operation... Registers are: Register number Modbus aaddress Parameter Received data scale Units Notes 40001 0 Total low 16 bits x1 Kg Total= (Total high x 65536)+Total low 40002 1 Total high 16 bits x1 Kg Im using Modbus R.H.R #3 function, reading from Slave aadress 0, reading vector length 2 into Master aadress MI0-MI1. So question is what to do next with those values in MI0-MI1? Regards, Ylle
-
Hi, I have OPLC V350-35-TA24 what includes onboard I/Os and configurable via wiring 2 Analog, 2 PT100/TC, and 1 HSC/ Shaft-encoder Input. So, first, i made changes in hardware project where analog input 2 and 3 were 0-10V, I connected them with potensiometer (i used voltage divider, so to analog input went 0,33-11,5 VDC, pot supply camed from same supply as OPLC +24VDC, pot signal went to analog input, pot ground went OPLC 0V). I also changed jumper setting, input 5 (analog input 3) - JP4 B, JP10 A, input 6 (analog input 2) - JP8 B, JP9 A. I made new project were was only linearization block: X1=0, X2=1000 (10V), Y1=0, Y2=16384, input MI0, output MI20. BUT in online test MI 0 was zero, I changed input voltage, but still, no numbers. Then I tested other analog input, same story !???? Today I changed analog input 2 (input 6) hardware configuration- 4-20 mA, jumper setting - JP8 B, JP9 B. Also, before inputs were PNP, now I changed them NPN source - JP12 A. 4-20 mA source I connected: plus into OPLC +V input and minus into analog input. In linearization block were: X1=0, X2=1000, Y1= 3277, Y2=16383, input MI 0, output MI100. BUT in online test MI0 were zero. What Im doing wrong?!! test 1903.vlp
-
HI! In our project computer are programs M90 Data Centre, DataXport (version 3.1.0 (DB107)) and for calling out through analog phoneline APACHE HCF V.90 56K Data Fax Voice Speakerphone PCI Modem, connected to PC - COM 3 and NOKIA MOBILE PHONE 30 DATA/FAX (GSM), connected to PC - COM 1. Computer is using Windows XP. M90 Data Centre is working very well with APACHE PCI modem but problem is with DataXport. I tried to use in DataXport also APACHE PCI modem but it wasent possible. I did all needed settings DataXport windows PC ports (COM 1, PSTN modem, type APACHE, baud rate 9600, dial type Tone), also in window Site and in window Communication PC. In DataXport window Mobile Services i choose modem type - Apache, later Other, COM port - 3, baud rate - 9600, later more, i did not change init string. I could not initialize PC-side modem, it showed ERROR. When i dialed from window Mobile service choosed number 0,,0781234, it called to another modem (its already tested and works with APACHE PCI modem, it is D-Link USB 56k Voice and Data Modem), the were handshakeing and then our PC-side modem Apache hanged up call. In window Run Project doing command Force call, was result "Modem not initalized". And thats was all! Later, next day i used in program DataXport for calling out through analog phoneline USRobotics Sportster Faxmodem 56k x2 external modem, connected to PC - COM 1( i disabled NOKIA MOBILE PHONE 30 DATA/FAX) . And everything went well, i did get data from PLC modem. So, questions is: is it possible that M90 Data Centre and DataXport could use same modem - APACHE HCF V.90 56K Data Fax Voice Speakerphone PCI Modem. When it is possible, is a thing with Apache PCI modem? Greeting, Ylle